
Adaptive LMS Filter
1. Problem Setup
In an acoustic echo cancellation system:
- A far-end signal (e.g., voice from a remote speaker) is played through a loudspeaker.
- Some portion of this sound reflects off surfaces and leaks back into the microphone as an echo.
- The goal is to remove this echo from the microphone signal while preserving the near-end speech.
2. LMS Adaptive Filtering Approach
An adaptive filter attempts to model the echo path and subtract the estimated echo from the microphone signal.
Definitions:
- \( x(n) \) → Far-end signal (input to the loudspeaker)
- \( d(n) \) → Microphone signal (contains both near-end speech + echo)
- \( y(n) \) → Adaptive filter output (estimated echo)
- \( e(n) = d(n) - y(n) \) → Error signal (ideally just the near-end speech)
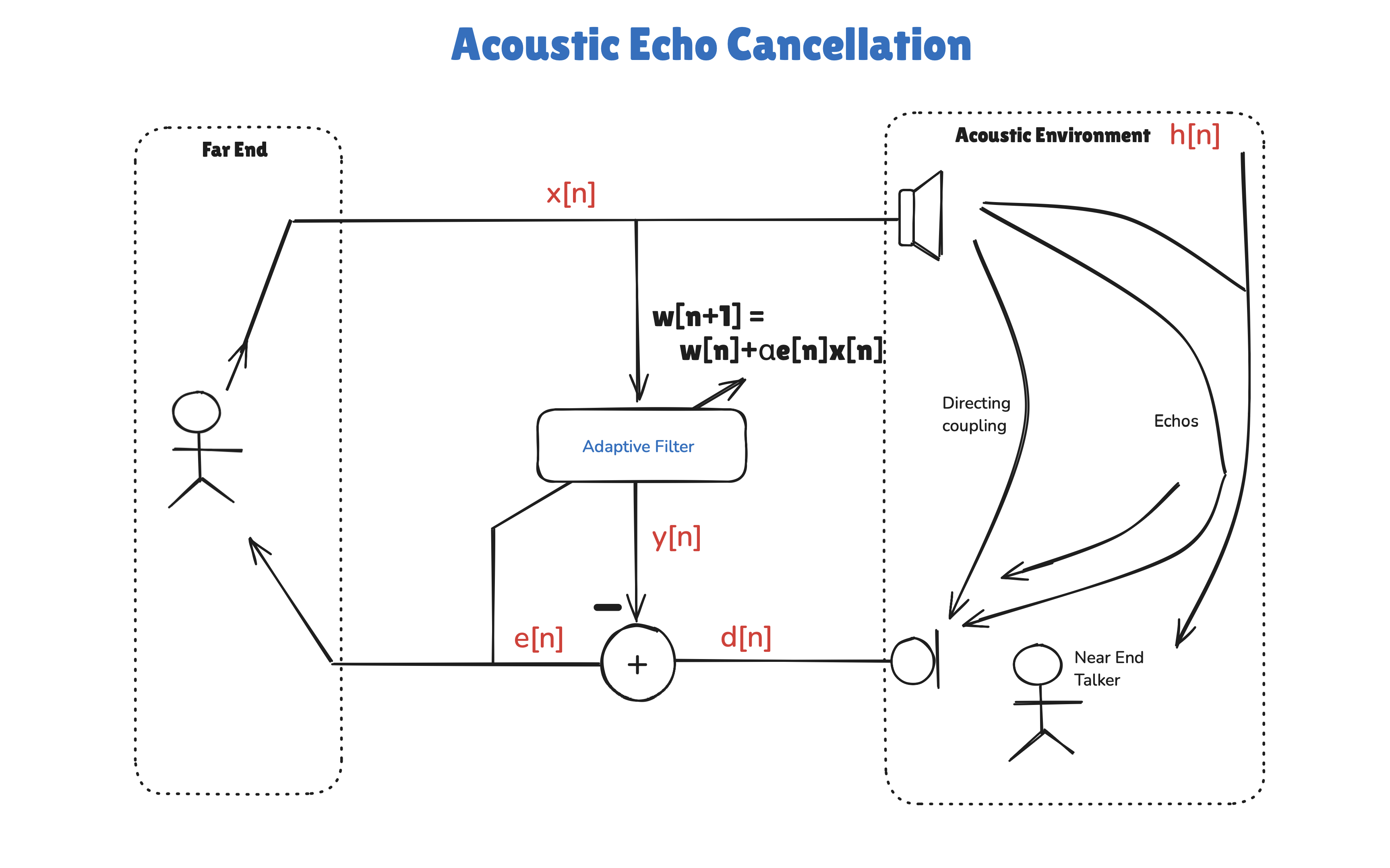
The LMS filter updates its weights to minimize the squared error:
\[ w(n+1) = w(n) + \mu e(n) x(n) \]
Where:
- \( w(n) \) → Adaptive filter coefficients
- \( \mu \) → Step size (controls convergence speed vs. stability)
- \( e(n) \) → Error signal
- \( x(n) \) → Input signal